
Latest News
-

-

-

-

-

Rockchip RK3568 External SD Card Design
2025-02-13
CAN Interface Isolation Design of TI AM6232
Introduction
With the rapid development of industrial automation, automotive electronics, and the Internet of Things (IoT), the Controller Area Network (CAN) bus, as an efficient and reliable communication protocol, is widely used in various embedded systems. The AM6232 chip, developed by Texas Instruments (TI), is a high-performance microprocessor that is commonly used in applications requiring high-speed processing and reliable communication. In such applications, the design of the CAN interface is crucial, especially in terms of isolation, to ensure the stability of the system and the accurate transmission of data.
This article will discuss the CAN interface isolation design of the TI AM6232, analyzing key design points, common isolation methods, and considerations in the design process.
1. The Need for Isolation in CAN Bus Systems
The widespread use of CAN bus makes it one of the most common communication standards in industrial control and automotive electronics. CAN bus systems need to have strong anti-interference capabilities because they often operate in complex electromagnetic environments, where they are susceptible to various noise sources.
To ensure system reliability, especially in high-voltage and high-noise environments, isolation design of the CAN interface is critical. Isolation can effectively mitigate the following issues:
●Electrical noise interference, ensuring signal integrity.
●Damage caused by ground potential differences, preventing electrical short circuits or hardware failures.
●Ensuring stable operation in harsh environments.
2. Features of the CAN Interface on the TI AM6232
The TI AM6232 is a high-performance processor that integrates a CAN controller and supports the CAN 2.0A/B protocol. It provides high throughput and low latency, making it suitable for complex applications.
The CAN interface on the AM6232 consists of two main signal lines: TX (transmit) and RX (receive), used for bi-directional data transmission. To ensure reliable data transmission, TI recommends using isolation components between these interface signals to protect against voltage fluctuations, electrical noise, and other issues that may cause data errors or hardware damage.
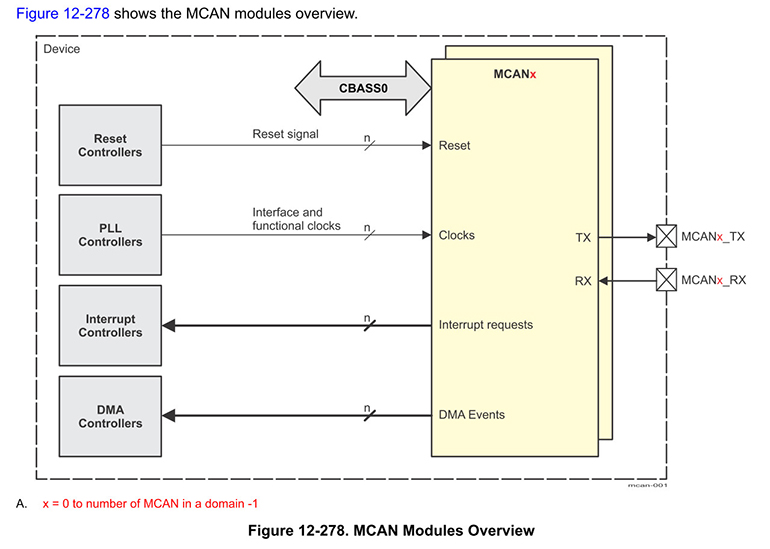
Figure 1 MCAN module block diagram
3. Methods for CAN Interface Isolation Design
The isolation design of the CAN interface typically involves the use of optical isolators or digital isolators, which effectively shield high voltage and electromagnetic interference, ensuring reliable data transmission. The specific methods include:
3.1 Optical Isolators
Optical isolators achieve electrical isolation by converting electrical signals into light signals for transmission and then reconverting them into electrical signals. The main advantage of optical isolators is their excellent anti-interference capability, which can effectively isolate electrical noise, ground potential differences, and other issues.
When designing the CAN interface with the AM6232, optical isolators are typically placed between the CAN_H and CAN_L signals to ensure the integrity of the signal transmission. Common optical isolators such as ISO1050 and ISO1042 can support high data rates and provide the necessary isolation levels.
3.2 Digital Isolators
Digital isolators use high-frequency signals transmitted through capacitive isolation to achieve electrical isolation. Compared to optical isolators, digital isolators offer higher transmission speeds and lower power consumption, making them more suitable for high-speed applications. TI's digital isolators, such as ISO7741 and ISO7740, are widely used in applications requiring high bandwidth and low power consumption.
In CAN interface isolation design, digital isolators are mainly used to provide stable data transmission protection between the CAN_H and CAN_L lines. Digital isolators have faster response times, making them ideal for high-speed CAN communication, reducing latency and ensuring the stability of high-frequency data transmission.
3.3 Bi-directional Isolation
In CAN bus communication, bi-directional data transmission is required, meaning that isolation components must support both forward and reverse signal isolation. In this case, selecting isolation devices that provide bi-directional isolation is crucial. TI’s isolators, such as the ISO1050, are capable of implementing bi-directional CAN signal isolation within a single chip, simplifying the design and reducing the need for external components.
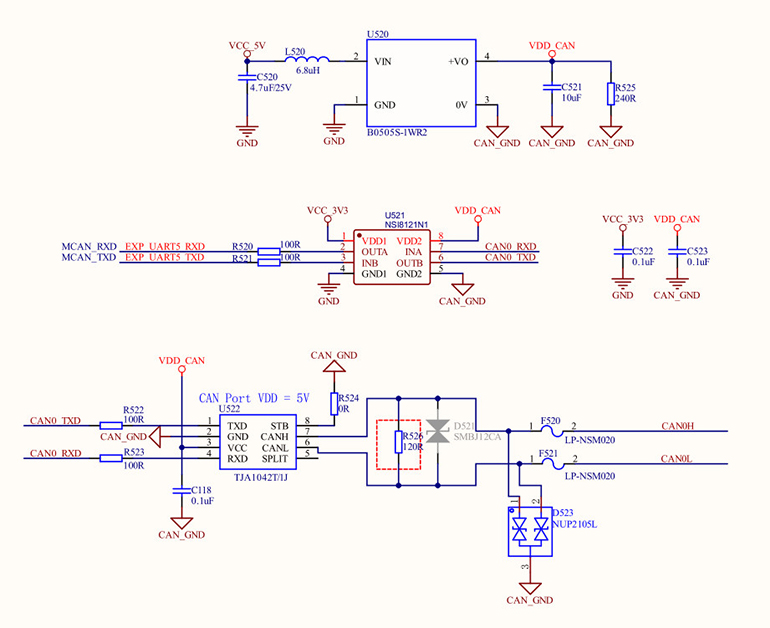
Figure 2 CAN isolation connection method
4. Considerations in Isolation Design
In addition to choosing the right isolation components, the following key factors must be considered when designing the isolation for the CAN interface of the TI AM6232:
4.1 Isolation Voltage
Depending on the application scenario, the isolation voltage level of the isolator must meet the system’s requirements. TI’s ISO series isolators generally support different isolation voltage levels (e.g., 2500V, 5000V), and selecting the appropriate voltage level can enhance the system's ability to withstand interference.
4.2 Data Rate
The data rate of the CAN bus (e.g., 1 Mbps) may be limited by the bandwidth of the isolators. Therefore, it is important to ensure that the chosen isolation components can support the required data rates. Most TI optical and digital isolators can support CAN communication speeds above 1 Mbps, but the specifications of each specific model should still be verified.
4.3 Latency and Power Consumption
Latency and power consumption are critical factors that impact CAN communication performance. In high-frequency applications, excessive latency can lead to data loss or errors, while high power consumption increases the system’s thermal load. Choosing low-latency, low-power isolators (such as TI's ISO7741 series) can significantly improve system performance.
5. Conclusion
The isolation design of the CAN interface on the TI AM6232 is critical for ensuring the system’s reliability and stability. By selecting the appropriate optical or digital isolators and tailoring the design to specific application needs, electrical noise, ground potential differences, and other issues can be effectively mitigated, ensuring accurate data transmission. In the actual design process, in addition to choosing suitable isolation components, factors such as isolation voltage, data rate, latency, and power consumption should be considered to achieve optimal system performance.
Through thoughtful isolation design, the AM6232’s CAN interface can reliably function in complex electromagnetic environments, providing high-performance communication solutions for industrial control, automotive electronics, and other fields.